Configure the AKD2G/AKD Drive
The Configuration tab under the EtherCAT![]() EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs : AKD tab allows you to configure drives once the following conditions have been met:
EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs : AKD tab allows you to configure drives once the following conditions have been met:
- The scan has been performed
- Your project is compliant with the physical devices on the EtherCAT network
- You have activated the Online Configuration mode
You then have access to all of the AKD configurations and parameters.
- In the Project Explorer, double-click the new AKD Drive or select Configuration from the context menu to open all the parameters linked to it.

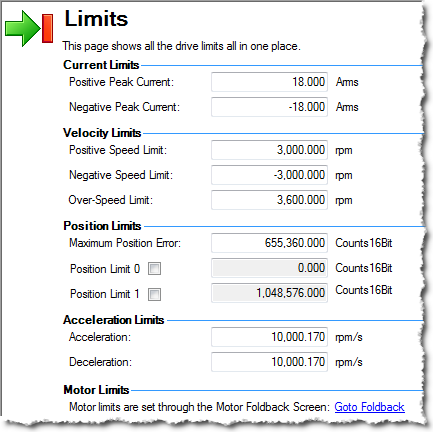
- Define the motion parameters in the Limits tab to configure the limited motor torque
 Torque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist, speed, and acceleration
Torque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist, speed, and acceleration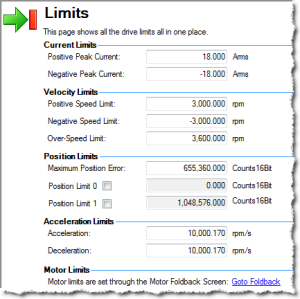
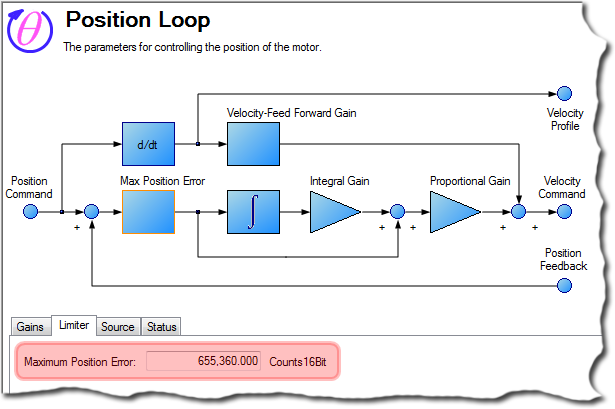
- Define the motion parameters in the Position Loop tab to configure the limiting following error.
- Define the resolution of the feedback position in the Feedback tab
Note that for all feedback types, the motor position feedback sent from the AKD drive to the controller through EtherCAT is normalized to 20 bits/rev or 1048576 counts/rev - Then, you must define the units to be used for the motion 1 :
- For Pipe Network, refer to Set the Axis Block Position Units
- For PLCopenA vendor -and product- independent worldwide association active in Industrial Control and aiming at standardizing PLC file formats based on XML, refer to Axis Data Parameters
-
-
User units in the PLC
"Programmable Logic Controller"
A Programmable Logic Controller, PLC, or Programmable Controller is a digital computer used for automation of industrial processes, such as control of machinery on factory assembly lines.
Used to synchronize the flow of inputs from (physical) sensors and events with the flow of outputs to actuators and events language editors are:- Position : User unit
- Velocity User unit/sec
- Acceleration: User unit/sec2
Several AKD tabs contain units that follow the standard AKD format:
- Position: 16 bits/rev
- Velocity: RPM"Revolutions per minute"
Is a unit of frequency of rotation: the number of full rotations completed in one minute around a fixed axis. It is used as a measure of rotational speed of a mechanical component
- Acceleration: RPM/ Sec
- Position : User unit
- To ensure high performance, define the load for your servo system.. KAS IDE"Integrated development environment"
An integrated development environment is a type of computer software that assists computer programmers in developing software.
IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger provides several options for performing the drive tuning:
- Slider Tuning - Allows adjustment to the desired bandwidthIn computer networking, bandwidth often refers to a data rate measured in bits/s, for example, network throughput. The reason for the connection of data rate with the term bandwidth is that the limit to the data rate of a physical communication link is related to its bandwidth in hertz using the slider (pre-calculated tuning)
- Performance Servo Tuner - Takes the drive through an automatic tuning sequence
- Manual Tuning - Allows you to set gains individually for Current Loop, Velocity Loop, and Position Loop
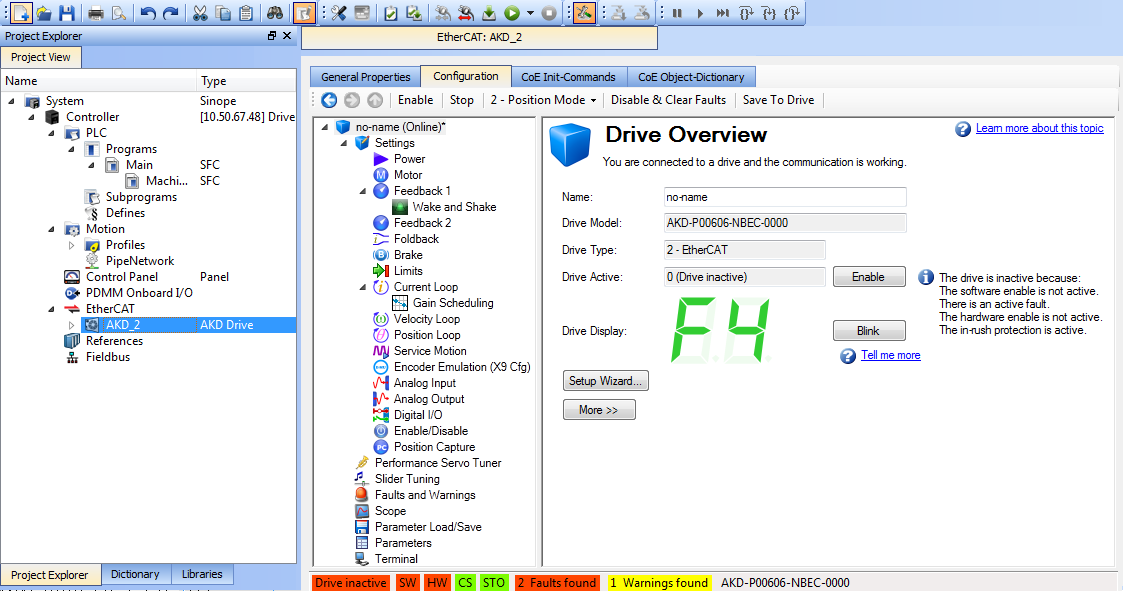
Figure 5-29: AKD Configuration
For more details on AKD configuration, AKD Drive Configuration
For more details on AKD Firmware Download, refer to the FAQ section.
-
-
After your application is downloaded to the controller you can activate the Online Configuration Mode to configure your drives with the Setup Wizard...
For more details, AKD Setup Wizard...






